SOFTWARE SOLUTIONS
We can offer various software solutions to hardware and instrumentation problems. Some examples are:
Safe Bottom
Bathymetric lidar surveys contain areas where the bottom is deeper than the maximum depth obtainable with the water conditions observed during the survey. The ability to assign a safe minimum depth to these areas increases the value and utility of the survey. We developed software algorithms that allow the use of high throughput aerial lidar bathymetry to verify navigational depths in conditions and places where it has not been previously applied.
When performing pre-boat surveys, the critical information is the location of shoals that are possible navigation hazards. It is not uncommon to have turbid water in these regions where lidar bottom returns are limited to 10-15 meters. When no bottom is detected it is beneficial to analyze the waveform of the return and determine the most shoal solution. With Safe Bottom, minimum possible depth is reported.
 Detected bottom data is shown in the first image. The bottoms were found and shown in the second image using a more sophisticated return detecting routine than our typical data processing. The waveforms without detected bottoms were then run through the total spectral energy algorithm. In the third image the results are shown combined first as a 2d plot and then in 3D. Note the shoal (yellow) Detected bottom data is shown in the first image. The bottoms were found and shown in the second image using a more sophisticated return detecting routine than our typical data processing. The waveforms without detected bottoms were then run through the total spectral energy algorithm. In the third image the results are shown combined first as a 2d plot and then in 3D. Note the shoal (yellow)
Camera Controller
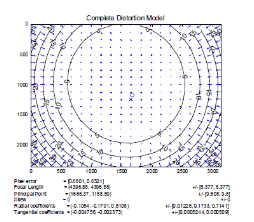 We implemented algorithms for metric calibration to quantitatively measure the lens distortion, center point, etc. This allows ortho-rectification without artifacts. We implemented additional algorithms that dynamically learns and changes the JPEG compression picture quality to maximize resolution while hitting a file target size We implemented algorithms for metric calibration to quantitatively measure the lens distortion, center point, etc. This allows ortho-rectification without artifacts. We implemented additional algorithms that dynamically learns and changes the JPEG compression picture quality to maximize resolution while hitting a file target size
| 
